Le projet SADE (SmArt high lift DEvices for next generation wings) du 7e Programme-cadre européen (Accord de subvention 213442) a étudié des éléments mécaniques "intelligents" de morphing pour les ailes de nouvelle génération, visant à améliorer les performances aérodynamiques, l'efficacité énergétique, ainsi qu'à réduire le bruit et les émissions à toutes les étapes du vol, en particulier lors de l'atterrissage.
Le projet a étudié plusieurs concepts de contrôle adaptatif. L’une des options développées par des experts allemands du DLR et du groupe Airbus (anciennement EADS) est une structure adaptative et "intelligente" de bec de bord d'attaque ou de slat, qui est fixée directement à la boîte de l’aile (figure 1).
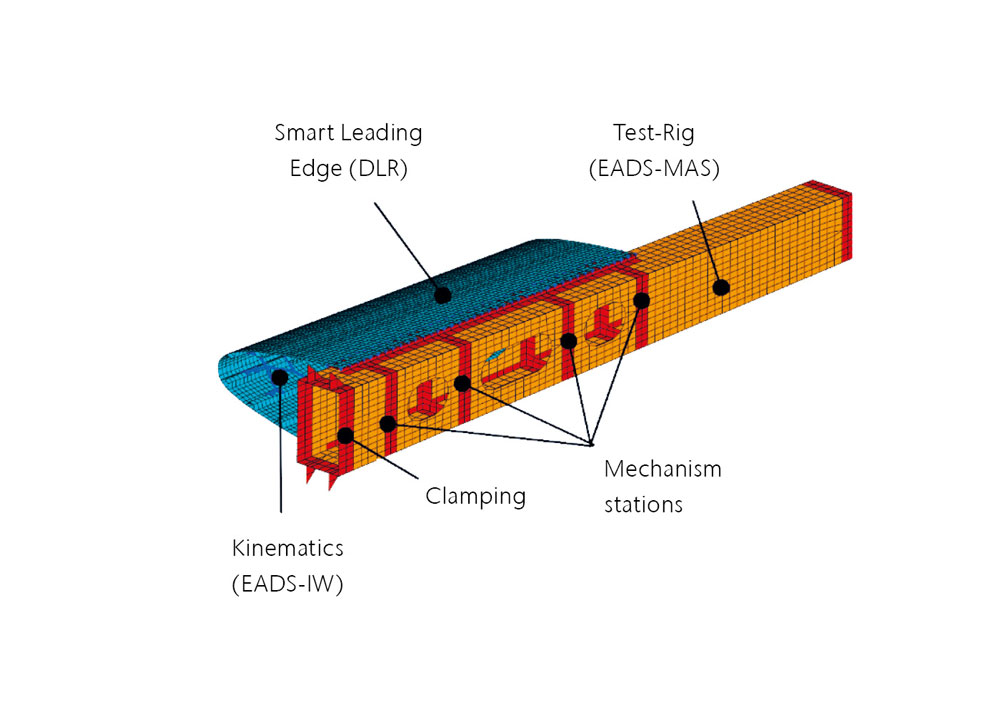
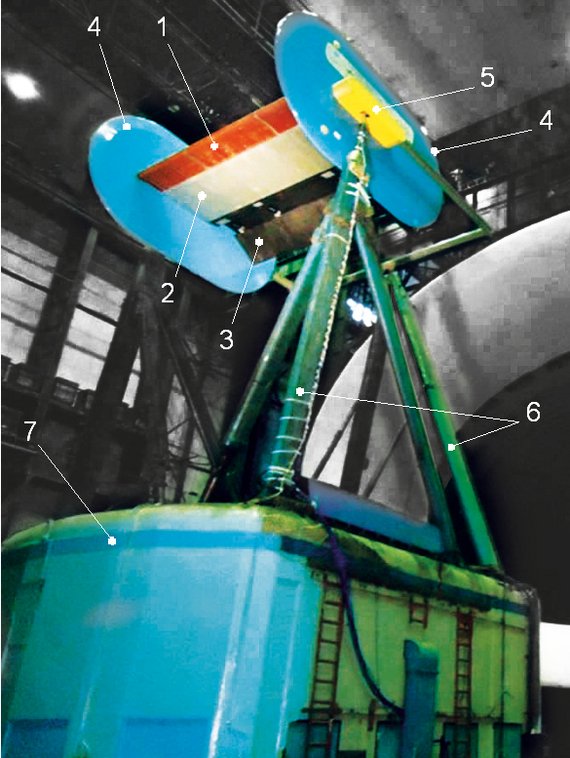
Une étape clé dans l’étude de ce concept a été la création d’un prototype à grande échelle d’une section d’aile d’avion équipée d’un bec de bord d’attaque morphing, puis son test dans la grande soufflerie à basse vitesse "TsAGI 101" (figure 2). Ce slat adaptatif en trois sections comprend une peau élastique renforcée en plastique composite à base de fibres de verre.
Dans le cadre des travaux de calcul et d’expérimentation particulièrement complexes du projet SADE, des experts de l’Institut central d’aérohydrodynamique (TsAGI), un Centre de recherche d’État russe, ont contribué à la conception et à la fabrication du prototype, aux mesures d’équilibre aérodynamique dans la soufflerie T-101, ainsi qu’à l’identification des caractéristiques de rigidité dynamique et statique de la section d’aile. Ces travaux sont essentiels non seulement pour répondre aux exigences de sécurité des tests en soufflerie sur des phénomènes aéroélastiques (flutter, buffeting, etc.), mais aussi pour valider la géométrie CAO et le modèle par éléments finis (NASTRAN) du prototype en s’appuyant sur les fréquences naturelles et les modes propres déterminés expérimentalement.
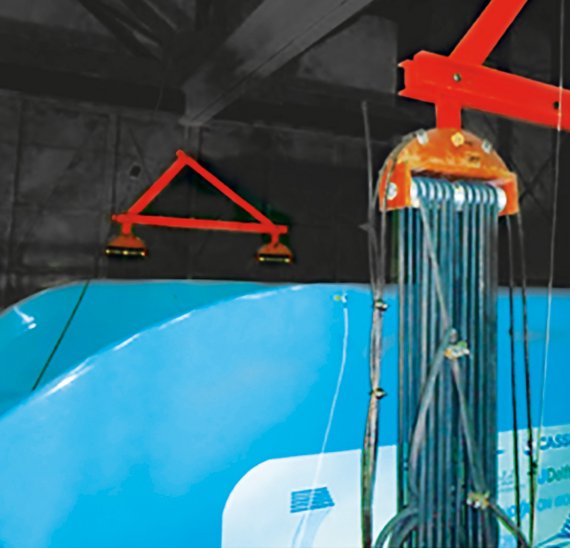
Pour obtenir les conditions limites requises lors des expériences, le prototype a été suspendu de chaque côté à deux ensembles de cordes élastiques accrochées à des traverses spéciales, montées sur des crochets d'un pont roulant (figure 3).
Les principales caractéristiques dynamiques du prototype ont été déterminées à l’aide de deux approches distinctes :
- La méthode classique du balayage sinusoïdal par paliers, qui consiste à rechercher les résonances à l’aide d’un vibrateur électrodynamique, en association avec des capteurs de contact pour mesurer les vibrations.
La méthode sans contact de vibrométrie laser Doppler (LDV), qui repose sur l’excitation pulsée des oscillations libres amorties à l’aide d’un marteau d’impact équipé d’un capteur de force intégré.
Pour la méthode standard, la structure a été excitée à l’aide d’un vibrateur électrodynamique Prodera EX220SC, et les caractéristiques dynamiques ont été enregistrées grâce au matériel et logiciel LMS SCADAS III / Stepped Sine LMS Test.Lab, en combinaison avec des capteurs de contact PCB 333V32.
Les mesures sans contact ont été effectuées à l’aide d’un système Polytec PSV-H4, et les vibrations des éléments structuraux ont été induites par un marteau d’impact PCB 086E80, appliqué sur les parties métalliques ou les nervures de renforcement du prototype.
Dans la figure 4, les modes propres de vibration du prototype calculés avec NASTRAN (rangée inférieure) sont comparés aux données expérimentales obtenues par la méthode sans contact (rangée supérieure) et par la méthode standard (rangée intermédiaire).
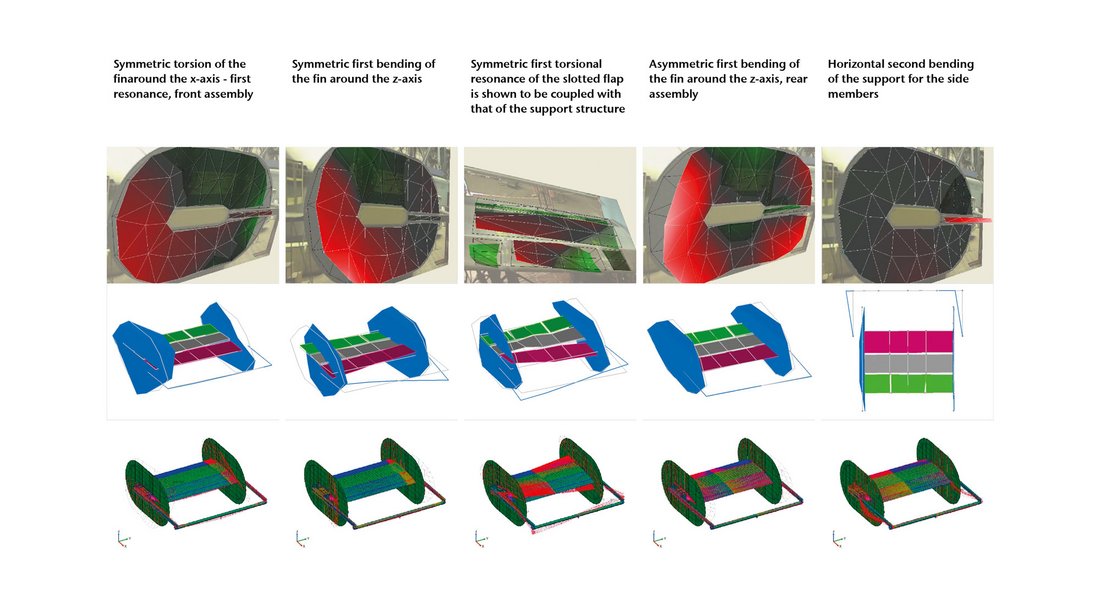
Le test avait pour objectif de déterminer les principales caractéristiques dynamiques des 20 premiers modes propres du prototype, ce qui a permis d’affiner la simulation mathématique en prenant en compte des comportements dynamiques complexes et non linéaires. En conséquence, l’écart entre les valeurs calculées et expérimentales obtenues avec la méthode standard n’a pas dépassé 6,5 %.
La comparaison des deux méthodes d’essai a mis en évidence des avantages significatifs de l’utilisation des vibromètres laser Doppler, tant sur le plan technique qu’économique. La méthode classique de résonance de phase a nécessité 13 jours de travail avec 2 ingénieurs et 2 techniciens, tandis que l’utilisation du système sans contact Polytec PSV-H4 a permis d’obtenir des données expérimentales de qualité acceptable en seulement 5 jours avec 2 ingénieurs et sans technicien.
Références
- Kintscher M. Method for the Pre-Design of a Smart Droop Nose using a Simplex Optimization Scheme. SAE Aerotech Congress and Exhibition, 10-12 novembre 2009, Seattle, Washington, USA.
- Amiryants G., Malyutin V., Timokhin V. Selectively deformable structures for design of adaptive wing smart elements. 27th Congress of the International Council of the Aeronautical Sciences – ICAS2010, 19-24 septembre 2010, Nice, France.
Crédits des images : Images fournies par les auteurs, sauf indication contraire. Image de couverture : ©fotolia.com/tanasan.